概述
如我们之前提到的,leveldb是典型的LSM树(Log Structured-Merge Tree)实现,即一次leveldb的写入过程并不是直接将数据持久化到磁盘文件中,而是将写操作首先写入日志文件中,其次将写操作应用在memtable上。
当leveldb达到checkpoint点(memtable中的数据量超过了预设的阈值),会将当前memtable冻结成一个不可更改的内存数据库(immutable memory db),并且创建一个新的memtable供系统继续使用。
immutable memory db会在后台进行一次minor compaction,即将内存数据库中的数据持久化到磁盘文件中。
在这里我们暂时不展开讨论minor compaction相关的内容,读者可以简单地理解为将内存中的数据持久化到文件
leveldb(或者说LSM树)设计Minor Compaction的目的是为了:
- 有效地降低内存的使用率;
- 避免日志文件过大,系统恢复时间过长;
当memory db的数据被持久化到文件中时,leveldb将以一定规则进行文件组织,这种文件格式成为sstable。在本文中将详细地介绍sstable的文件格式以及相关读写操作。
SStable文件格式
物理结构
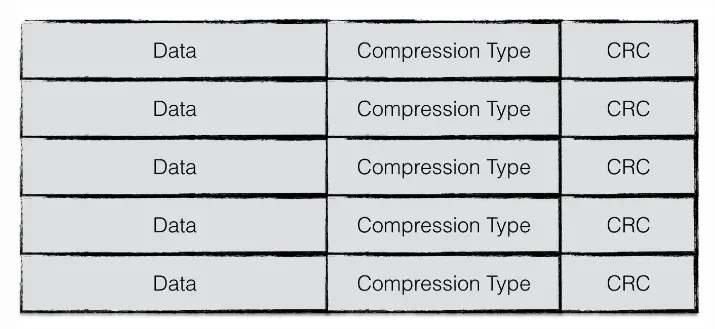
为了提高整体的读写效率,一个sstable文件按照固定大小进行块划分,默认每个块的大小为4KiB。每个Block中,除了存储数据以外,还会存储两个额外的辅助字段:
- 压缩类型
- CRC校验码 压缩类型说明了Block中存储的数据是否进行了数据压缩,若是,采用了哪种算法进行压缩。leveldb中默认采用Snappy算法进行压缩。
CRC校验码是循环冗余校验校验码,校验范围包括数据以及压缩类型。
逻辑结构
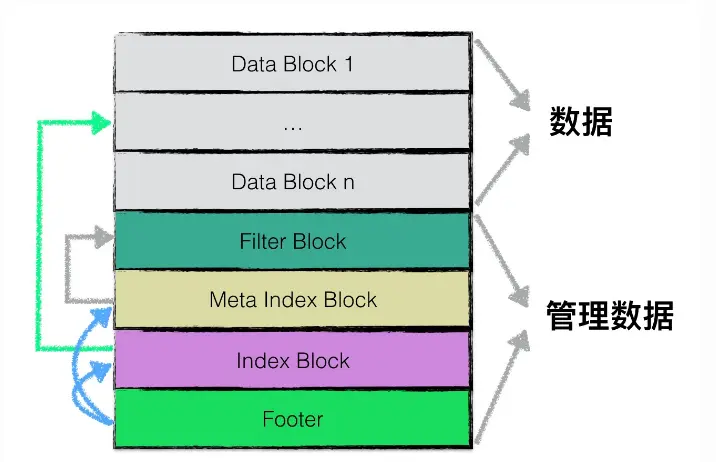
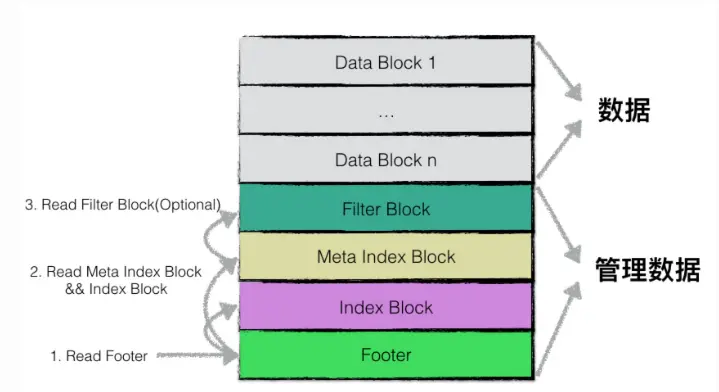
在逻辑上,根据功能不同,leveldb在逻辑上又将sstable分为:
- data block: 用来存储key value数据对;
- filter block: 用来存储一些过滤器相关的数据(布隆过滤器),但是若用户不指定leveldb使用过滤器,leveldb在该block中不会存储任何内容;
- meta Index block: 用来存储filter block的索引信息(索引信息指在该sstable文件中的偏移量以及数据长度);
- index block:index block中用来存储每个data block的索引信息;
- footer: 用来存储meta index block及index block的索引信息;
 注意,1-4类型的区块,其物理结构都是如1.1节所示,每个区块都会有自己的压缩信息以及CRC校验码信息。
注意,1-4类型的区块,其物理结构都是如1.1节所示,每个区块都会有自己的压缩信息以及CRC校验码信息。
data block结构
data block中存储的数据是leveldb中的keyvalue键值对。其中一个data block中的数据部分(不包括压缩类型、CRC校验码)按逻辑又以下图进行划分:
第一部分用来存储keyvalue数据。由于sstable中所有的keyvalue对都是严格按序存储的,为了节省存储空间,leveldb并不会为每一对keyvalue对都存储完整的key值,而是存储与上一个key非共享的部分,避免了key重复内容的存储。
每间隔若干个keyvalue对,将为该条记录重新存储一个完整的key。重复该过程(默认间隔值为16),每个重新存储完整key的点称之为Restart point。
每间隔若干个keyvalue对,将为该条记录重新存储一个完整的key。重复该过程(默认间隔值为16),每个重新存储完整key的点称之为Restart point。
每个数据项的格式如下图所示:

一个entry分为5部分内容:
- 与前一条记录key共享部分的长度;
- 与前一条记录key不共享部分的长度;
- value长度;
- 与前一条记录key非共享的内容;
- value内容;
例如:
| |
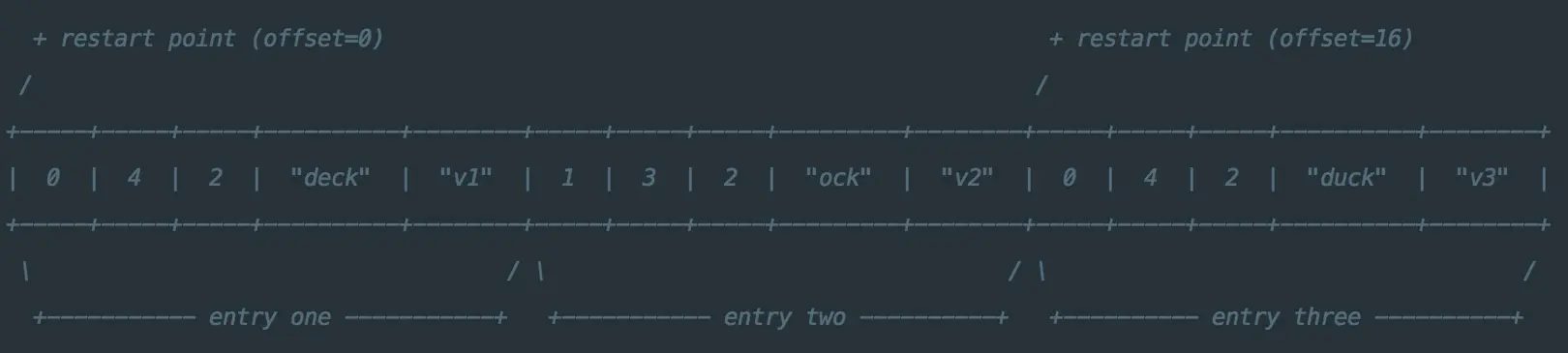 三组entry按上图的格式进行存储。值得注意的是restart_interval为2,因此每隔两个entry都会有一条数据作为restart point点的数据项,存储完整key值。因此entry3存储了完整的key。
三组entry按上图的格式进行存储。值得注意的是restart_interval为2,因此每隔两个entry都会有一条数据作为restart point点的数据项,存储完整key值。因此entry3存储了完整的key。
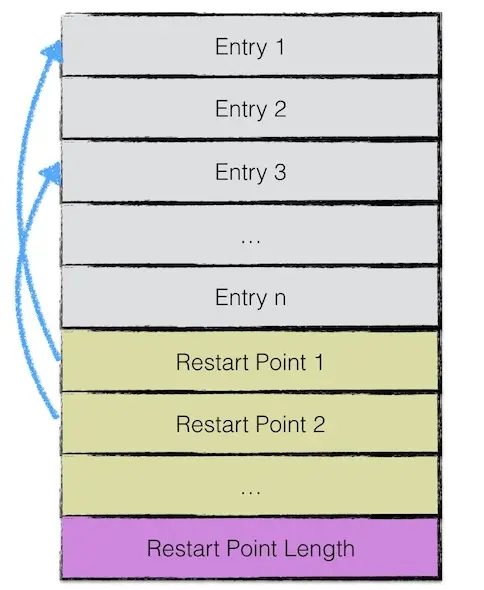
此外,第一个restart point为0(偏移量),第二个restart point为16,restart point共有两个,因此一个datablock数据段的末尾添加了下图所示的数据:
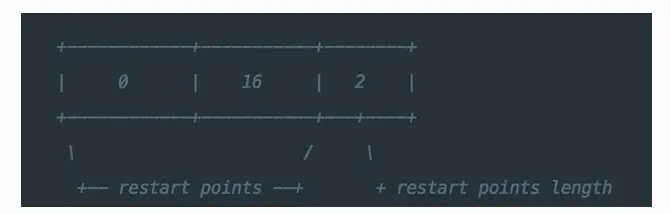 尾部数据记录了每一个restart point的值,以及所有restart point的个数。
尾部数据记录了每一个restart point的值,以及所有restart point的个数。
filter block结构
讲完了data block,在这一章节将展开讲述filter block的结构。
为了加快sstable中数据查询的效率,在直接查询datablock中的内容之前,leveldb首先根据filter block中的过滤数据判断指定的datablock中是否有需要查询的数据,若判断不存在,则无需对这个datablock进行数据查找。
filter block存储的是data block数据的一些过滤信息。这些过滤数据一般指代布隆过滤器的数据,用于加快查询的速度,关于布隆过滤器的详细内容,可以见《Leveldb源码分析 - 布隆过滤器》。
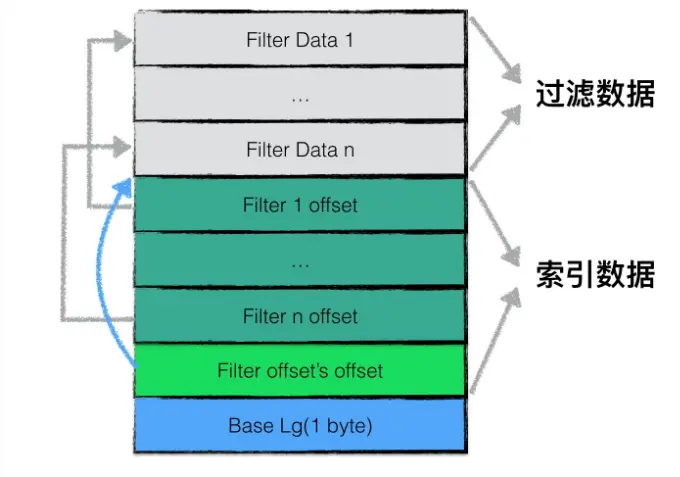
filter block存储的数据主要可以分为两部分:(1)过滤数据(2)索引数据。
其中索引数据中,filter i offset表示第i个filter data在整个filter block中的起始偏移量,filter offset’s offset表示filter block的索引数据在filter block中的偏移量。
在读取filter block中的内容时,可以首先读出filter offset’s offset的值,然后依次读取filter i offset,根据这些offset分别读出filter data。
Base Lg默认值为11,表示每2KB的数据,创建一个新的过滤器来存放过滤数据。
一个sstable只有一个filter block,其内存储了所有block的filter数据. 具体来说,filter_data_k 包含了所有起始位置处于 [basek, base(k+1)]范围内的block的key的集合的filter数据,按数据大小而非block切分主要是为了尽量均匀,以应对存在一些block的key很多,另一些block的key很少的情况。
leveldb中,特殊的sstable文件格式设计简化了许多操作,例如: 索引和BloomFilter等元数据可随文件一起创建和销毁,即直接存在文件里,不用加载时动态计算,不用维护更新
meta index block结构
meta index block用来存储filter block在整个sstable中的索引信息。
meta index block只存储一条记录:
该记录的key为:“filter.“与过滤器名字组成的常量字符串
该记录的value为:filter block在sstable中的索引信息序列化后的内容,索引信息包括:(1)在sstable中的偏移量(2)数据长度。
index block结构
与meta index block类似,index block用来存储所有data block的相关索引信息。
indexblock包含若干条记录,每一条记录代表一个data block的索引信息。
一条索引包括以下内容:
- data block i 中最大的key值;
- 该data block起始地址在sstable中的偏移量;
- 该data block的大小;
其中,data block i最大的key值还是index block中该条记录的key值。 如此设计的目的是,依次比较index block中记录信息的key值即可实现快速定位目标数据在哪个data block中。
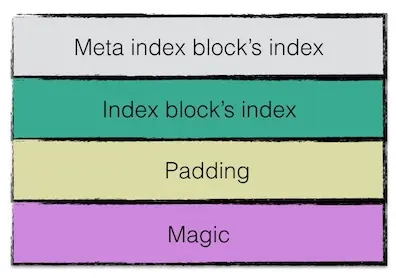
footer结构
footer大小固定,为48字节,用来存储meta index block与index block在sstable中的索引信息,另外尾部还会存储一个magic word,内容为:“http://code.google.com/p/leveldb/"字符串sha1哈希的前8个字节。
读写操作
在介绍完sstable文件具体的组织方式之后,我们再来介绍一下相关的读写操作。为了便于读者理解,将首先介绍写操作。
写操作
sstable的写操作通常发生在:
- memory db将内容持久化到磁盘文件中时,会创建一个sstable进行写入;
- leveldb后台进行文件compaction时,会将若干个sstable文件的内容重新组织,输出到若干个新的sstable文件中;
对sstable进行写操作的数据结构为tWriter,具体定义如下:
| |
主要包括了一个sstable的文件描述符,底层文件系统的writer,该sstable中所有数据项最大最小的key值以及一个内嵌的tableWriter。
一次sstable的写入为一次不断利用迭代器读取需要写入的数据,并不断调用tableWriter的Append函数,直至所有有效数据读取完毕,为该sstable文件附上元数据的过程。
该迭代器可以是一个内存数据库的迭代器,写入情景对应着上述的第一种情况;
该迭代器也可以是一个sstable文件的迭代器,写入情景对应着上述的第二种情况;
sstable的元数据包括:(1)文件编码(2)大小(3)最大key值(4)最小key值
故,理解tableWriter的Append函数是理解整个写入过程的关键。
tableWriter
在介绍append函数之前,首先介绍一下tableWriter这个数据结构。主要的定义如下:
| |
其中blockWriter与filterWriter表示底层的两种不同的writer,blockWriter负责写入data数据的写入,而filterWriter负责写入过滤数据。
pendingBH记录了上一个dataBlock的索引信息,当下一个dataBlock的数据开始写入时,将该索引信息写入indexBlock中。
Append
一次append函数的主要逻辑如下:
- 若本次写入为新dataBlock的第一次写入,则将上一个dataBlock的索引信息写入;
- 将keyvalue数据写入datablock;
- 将过滤信息写入filterBlock;
- 若datablock中的数据超过预定上限,则标志着本次datablock写入结束,将内容刷新到磁盘文件中;
| |
dataBlock.append
该函数将编码后的kv数据写入到dataBlock对应的buffer中,编码的格式如上文中提到的数据项的格式。此外,在写入的过程中,若该数据项为restart点,则会添加相应的restart point信息。
filterBlock.append
该函数将kv数据项的key值加入到过滤信息中,具体可见《Leveldb源码解析 - 布隆过滤器》
finishBlock
若一个datablock中的数据超过了固定上限,则需要将相关数据写入到磁盘文件中。
在写入时,需要做以下工作:
- 封装dataBlock,记录restart point的个数;
- 若dataBlock的数据需要进行压缩(例如snappy压缩算法),则对dataBlock中的数据进行压缩;
- 计算checksum;
- 封装dataBlock索引信息(offset,length);
- 将datablock的buffer中的数据写入磁盘文件;
- 利用这段时间里维护的过滤信息生成过滤数据,放入filterBlock对用的buffer中;
Close
当迭代器取出所有数据并完成写入后,调用tableWriter的Close函数完成最后的收尾工作:
- 若buffer中仍有未写入的数据,封装成一个datablock写入;
- 将filterBlock的内容写入磁盘文件;
- 将filterBlock的索引信息写入metaIndexBlock中,写入到磁盘文件;
- 写入indexBlock的数据;
- 写入footer数据;
至此为止,所有的数据已经被写入到一个sstable中了,由于一个sstable是作为一个memory db或者Compaction的结果原子性落地的,因此在sstable写入完成之后,将进行更为复杂的leveldb的版本更新,将在接下来的文章中继续介绍。
读操作
读操作作为写操作的逆过程,充分理解了写操作,将会帮助理解读操作。
下图为在一个sstable中查找某个数据项的流程图:
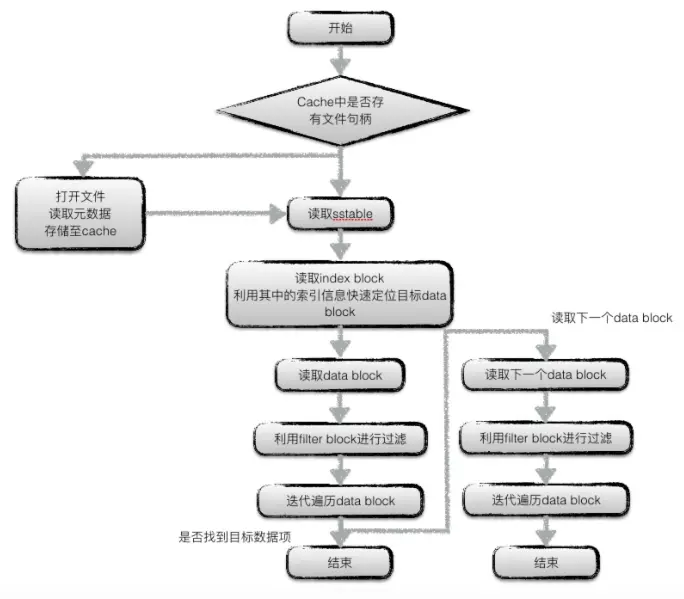
大致流程为:
- 首先判断“文件句柄”cache中是否有指定sstable文件的文件句柄,若存在,则直接使用cache中的句柄;否则打开该sstable文件,按规则读取该文件的元数据,将新打开的句柄存储至cache中;
- 利用sstable中的index block进行快速的数据项位置定位,得到该数据项有可能存在的两个data block;
- 利用index block中的索引信息,首先打开第一个可能的data block;
- 利用filter block中的过滤信息,判断指定的数据项是否存在于该data block中,若存在,则创建一个迭代器对data block中的数据进行迭代遍历,寻找数据项;若不存在,则结束该data block的查找;
- 若在第一个data block中找到了目标数据,则返回结果;若未查找成功,则打开第二个data block,重复步骤4;
- 若在第二个data block中找到了目标数据,则返回结果;若未查找成功,则返回Not Found错误信息;
缓存
在leveldb中,使用cache来缓存两类数据:
- sstable文件句柄及其元数据;
- data block中的数据; 因此在打开文件之前,首先判断能够在cache中命中sstable的文件句柄,避免重复读取的开销。
元数据读取
由于sstable复杂的文件组织格式,因此在打开文件后,需要读取必要的元数据,才能访问sstable中的数据。
元数据读取的过程可以分为以下几个步骤:
- 读取文件的最后48字节的利用,即Footer数据;
- 读取Footer数据中维护的(1) Meta Index Block(2) Index Block两个部分的索引信息并记录,以提高整体的查询效率;
- 利用meta index block的索引信息读取该部分的内容;
- 遍历meta index block,查看是否存在“有用”的filter block的索引信息,若有,则记录该索引信息;若没有,则表示当前sstable中不存在任何过滤信息来提高查询效率;
数据项的快速定位
sstable中存在多个data block,倘若依次进行“遍历”显然是不可取的。但是由于一个sstable中所有的数据项都是按序排列的,因此可以利用有序性已经index block中维护的索引信息快速定位目标数据项可能存在的data block。
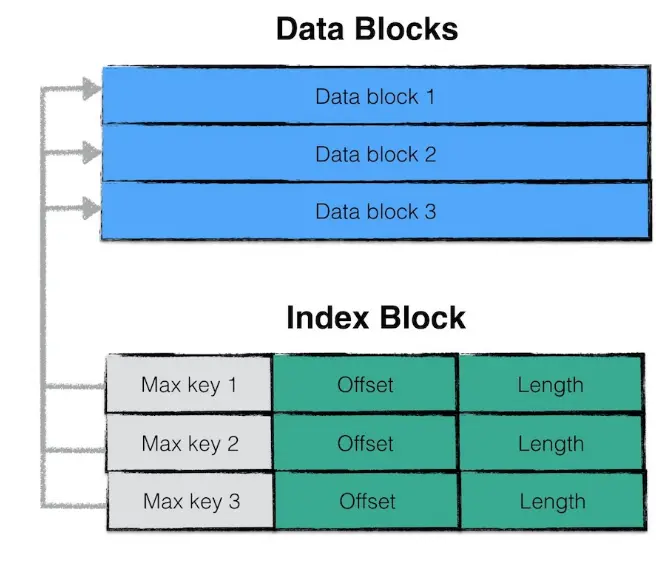
一个index block的文件结构示意图如下:
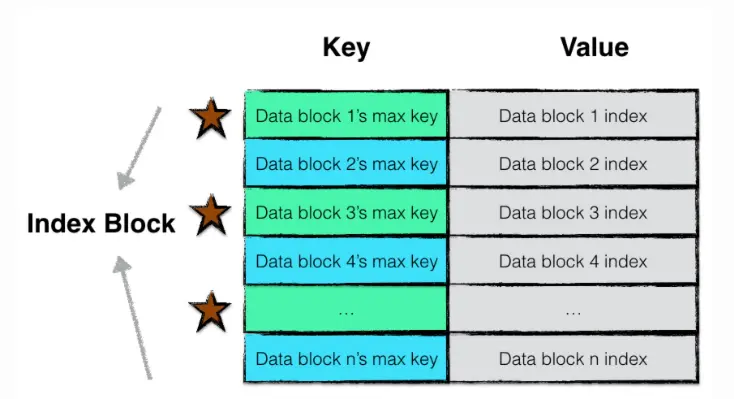
index block是由一系列的键值对组成,每一个键值对表示一个data block的索引信息。
键值对的key为该data block中数据项key的最大值,value为该data block的索引信息(offset, length)。
因此若需要查找目标数据项,仅仅需要依次比较index block中的这些索引信息,倘若目标数据项的key大于某个data block中最大的key值,则该data block中必然不存在目标数据项。故通过这个步骤的优化,可以直接确定目标数据项落在哪个data block的范围区间内。
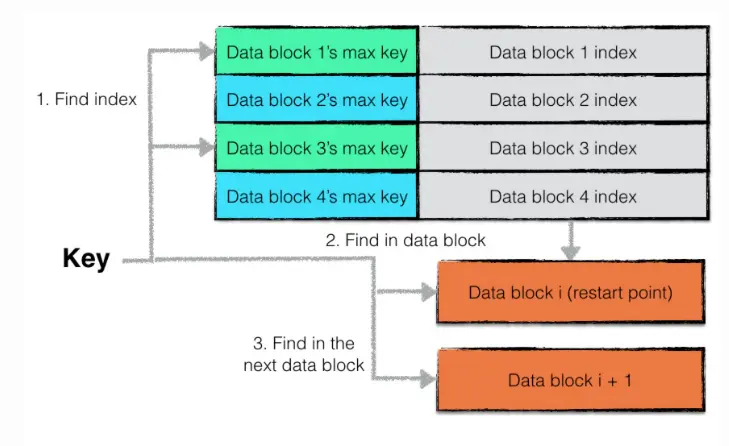
值得注意的是,与data block一样,index block中的索引信息同样也进行了key值截取,即第二个索引信息的key并不是存储完整的key,而是存储与前一个索引信息的key不共享的部分,区别在于data block中这种范围的划分粒度为16,而index block中为2 。 也就是说,index block连续两条索引信息会被作为一个最小的“比较单元“,在查找的过程中,若第一个索引信息的key小于目标数据项的key,则紧接着会比较第三条索引信息的key。 这就导致最终目标数据项的范围区间为某”两个“data block。
过滤data block
若sstable存有每一个data block的过滤数据,则可以利用这些过滤数据对data block中的内容进行判断,“确定”目标数据是否存在于data block中。
过滤的原理为:
- 若过滤数据显示目标数据不存在于data block中,则目标数据一定不存在于data block中;
- 若过滤数据显示目标数据存在于data block中,则目标数据可能存在于data block中; 具体的原理可能参见《布隆过滤器》。
因此利用过滤数据可以过滤掉部分data block,避免发生无谓的查找。
查找data block
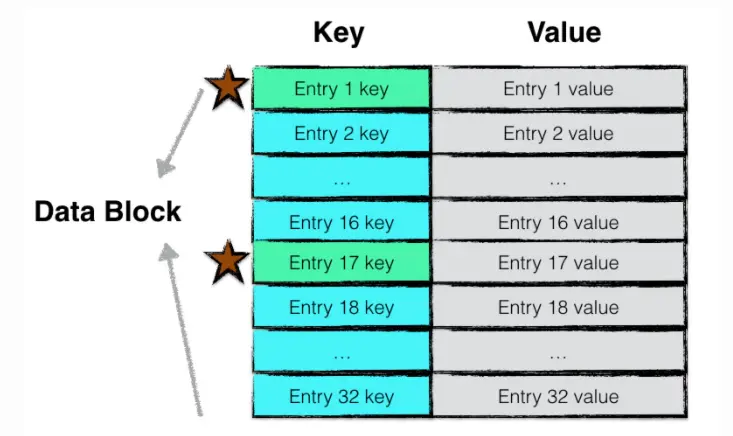 在data block中查找目标数据项是一个简单的迭代遍历过程。虽然data block中所有数据项都是按序排序的,但是作者并没有采用“二分查找”来提高查找的效率,而是使用了更大的查找单元进行快速定位。
在data block中查找目标数据项是一个简单的迭代遍历过程。虽然data block中所有数据项都是按序排序的,但是作者并没有采用“二分查找”来提高查找的效率,而是使用了更大的查找单元进行快速定位。
与index block的查找类似,data block中,以16条记录为一个查找单元,若entry 1的key小于目标数据项的key,则下一条比较的是entry 17。
因此查找的过程中,利用更大的查找单元快速定位目标数据项可能存在于哪个区间内,之后依次比较判断其是否存在与data block中。
可以看到,sstable很多文件格式设计(例如restart point, index block,filter block,max key)在查找的过程中,都极大地提升了整体的查找效率。
文件特点
只读性
sstable文件为compaction的结果原子性的产生,在其余时间是只读的。
完整性
一个sstable文件,其辅助数据:
- 索引数据
- 过滤数据
都直接存储于同一个文件中。当读取是需要使用这些辅助数据时,无须额外的磁盘读取;当sstable文件需要删除时,无须额外的数据删除。简要地说,辅助数据随着文件一起创建和销毁。
并发访问友好性
由于sstable文件具有只读性,因此不存在同一个文件的读写冲突。
leveldb采用引用计数维护每个文件的引用情况,当一个文件的计数值大于0时,对此文件的删除动作会等到该文件被释放时才进行,因此实现了无锁情况下的并发访问。
Cache一致性
sstable文件为只读的,因此cache中的数据永远于sstable文件中的数据保持一致。
参考: https://leveldb-handbook.readthedocs.io/zh/latest/sstable.html